Wie im letzten Blogpost erwähnt wurde das Thema der Sensorungenauigkeit als potenzielles Risiko für die Datenerhebung identifiziert und mittlerweile auch evaluiert. Wir können dabei mit gutem Gewissen feststellen, dass dies kein Problem in der weiterführenden Entwicklung darstellt. Wie die nachfolgende Grafik zeigt, schwanken die Messwerte im Ruhezustand kaum.
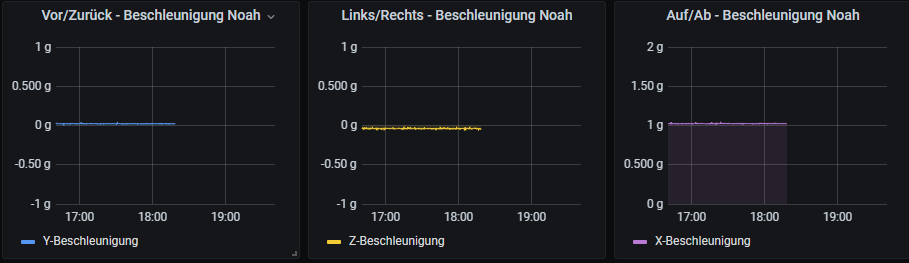
Über mehrere Stunden konnten wir nur geringste Veränderungen feststellen, sodass die Messungenauigkeit mit kleinen Anpassungen quasi beseitigt werden kann. Wie in einer Gleichung f(x) = x + y muss hier nur y angepasst werden, um den durchschnittlichen Wert von 0 auf allen 3 Achsen zu erreichen.
Auch werden die Messwerte selbst kaum von den geringen Schwankungen beeinflusst. Im Ruhezustand schwanken die Messwerte um 0.015 G. Im Vergleich zu den Messwerten, bei denen Schwankungen von bis zu 2 G erreicht werden, wie in der nächsten Grafik zu sehen ist, schlagen diese Schwankungen mit weniger als 1% ins Gewicht. Wir können dementsprechend beruhigt sagen, dass der Sensor aussagekräftige Werte liefert.

Wie wir in den Werten sehen sind diese allerdings recht unruhig. Einzelne Ausbrüche durch Kurven oder Bremsen sind zwar gut zu erkennen, könnten in ihrer Darstellung aber noch harmonischer sein. In den nächsten Schritten der Entwicklung sollen diese Kurven geglättet werden, damit die Daten benutzerfreundlicher ausgelesen werden können. Hierbei müssen 2 Kriterien erfüllt werden:
- Die Daten sollen weniger untereinander weniger stark schwanken. Das heißt in einer Linkskurve soll ein großer Ausbruch angezeigt werden und keine 50 kleinen.
- Die Daten müssen weiterhin aussagekräftig bleiben, das heißt sie dürfen nicht zu stark geglättet werden.
Ein erster Ansatz hierzu könnte sein die Daten im Skript zu glätten, bevor sie an die Datenbank weitergeleitet werden. Bei einer Frequenz von 10 Messungen pro Sekunde wäre es beispielsweise möglich den Durchschnitt der letzten 5 Messungen zu bilden. Dadurch wären die Kurven gleichmäßiger. Durch den geringen Zeitraum von 0.5 Sekunden könnte zudem ausgeschlossen werden, dass einzelne Ausbrüche nicht aufgenommen werden, da ein normales Fahrmanöver länger als 0.5 Sekunden braucht.
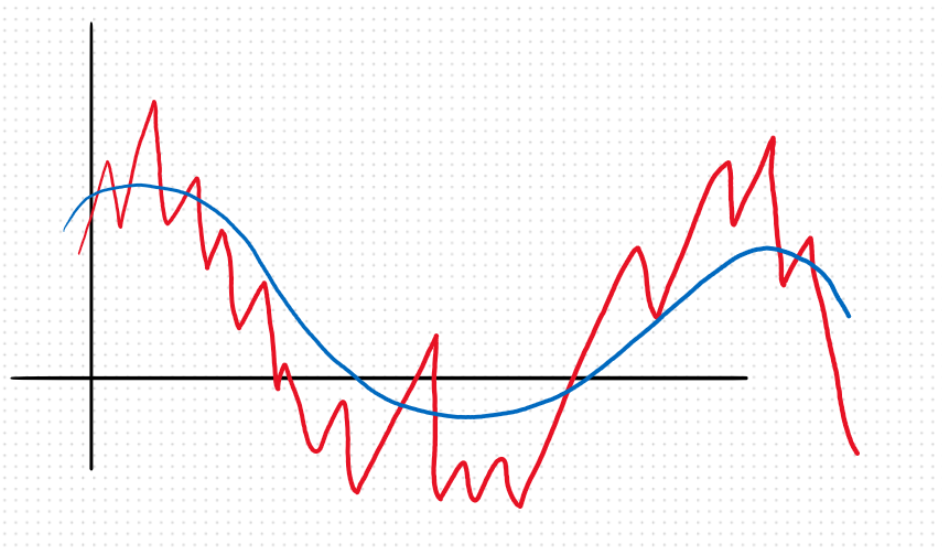
Aus der roten Kurve könnte dann die deutlich schöner aussehende blaue Kurve geschaffen werden.